Новый робот-охотник может изловить самое хрупкое подводное животное, не повредив его - «Роботы»
Чтобы изучить неведомую зверушку, ее нужно изловить, а для лова требуются инструменты. К XXI веку ученые поняли, что типовая рыболовная сеть чрезмерно калечит морских существ, поэтому возникла нужда в новых способах их поимки. Перспективным кандидатом стал робот-ловчий, функционирующий по принципу оригами.
Самая сложная морская добыча — это кальмары и медузы, чьи нежные тела не выдерживают встречи с грубыми инструментами. Текущий подход сводится к попыткам загнать животное в камеру и успеть закрыть крышку до того, как он выберется наружу. Это требует изрядной ловкости от охотников, и не всегда приводит к успеху. Идеальный вариант – ловушка сама выстраивается вокруг цели и запирает ее внутри.
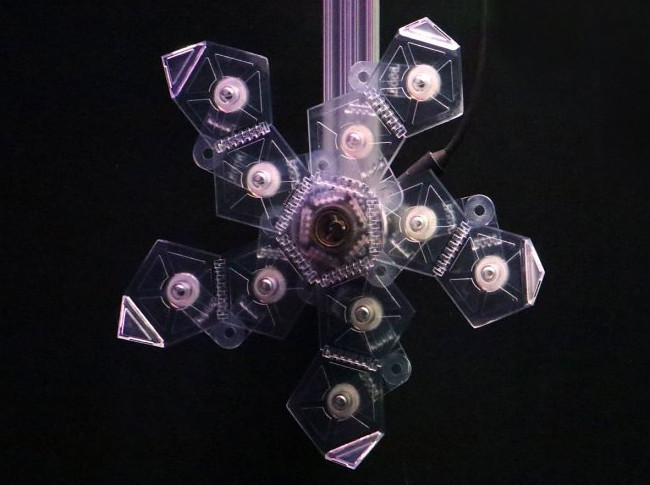
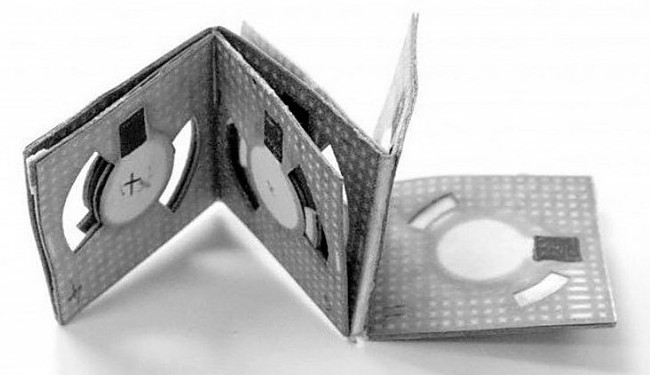
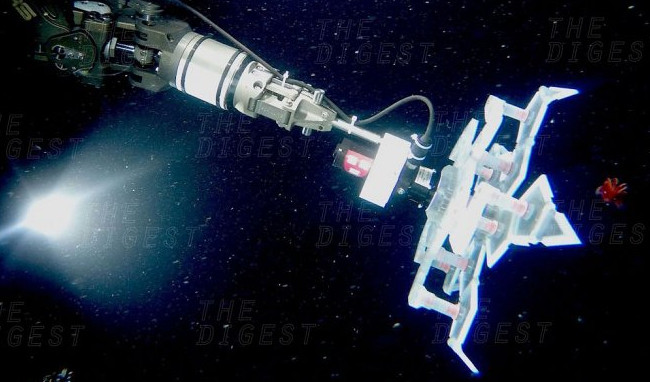
Инженер Чи Эрн Тео из Гарвардской лаборатории микророботов разработал конструкцию в виде объемного додекаэдра, правильного многогранника с 12-ю одинаковыми сторонами. Здесь много граней, но все они складываются по принципу оригами, поэтому для раскрытия и складывания конструкции достаточно всего одного привода. В сложенном виде ловушка выглядит как стопка полимерных пластин, но по команде она разворачивается и смыкает грани, заключая добычу внутри додекаэдра.
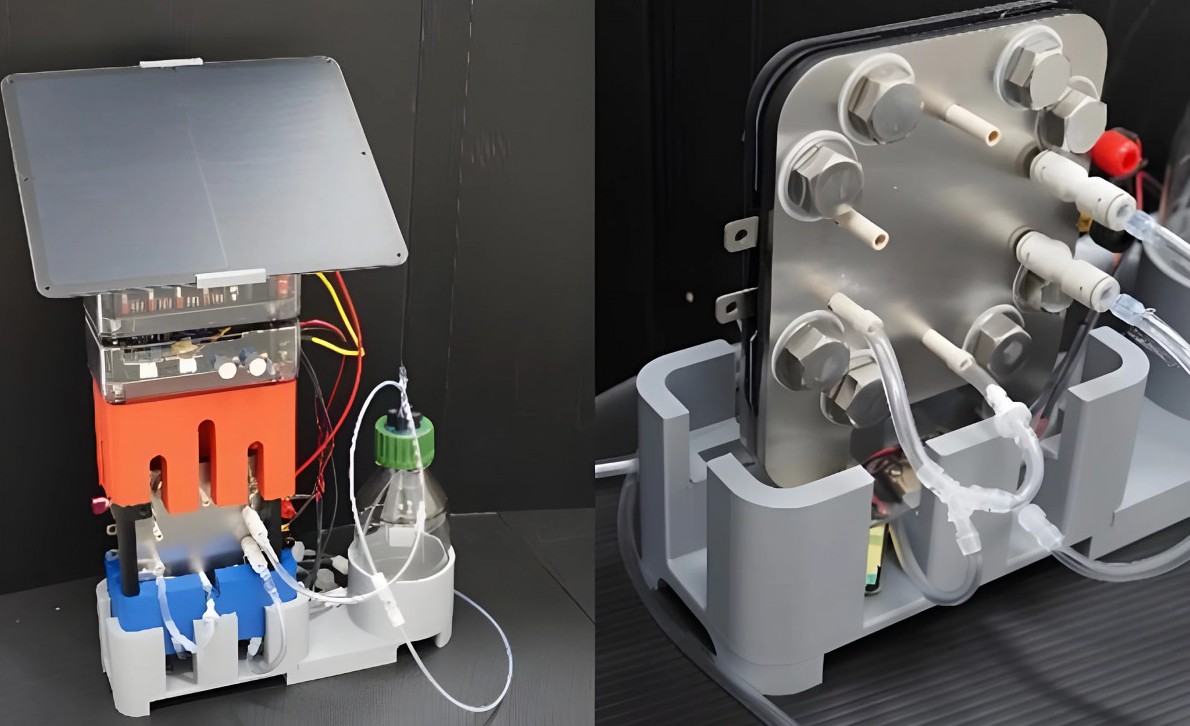
Это прототип, который пока протестирован на глубинах до 700 м, хотя задумка в том, чтобы создать автоматическую ловушку для глубин до 11 км. Для этого нужно поработать над скоростью и точностью движения граней, смонтировать сенсоры для поиска добычи, подумать над двигателями, чтобы ловушка могла приближаться к своей цели. А в перспективе такие системы можно будет применять и в космосе – там, где требуется аккуратный захват хрупкого объекта.
И будьте в курсе первыми!