Роботы Flip-Flop: Между гибкостью и жёсткостью - «Роботы»
Большинство роботов имеют жесткую конструкцию — и этому есть своё объяснение. «Жёстких» роботов легче проектировать, собирать, настраивать и затем поручать самую разнообразную работу от уборки мусора до обезвреживания взрывных устройств.
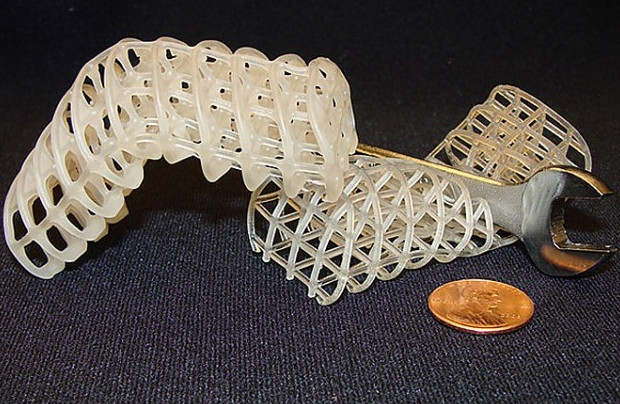
Основу механизма «жёстких» роботов составляют приводы и гидравлика. Однако в последнее время появилась иная концепция создания роботизированных устройств – «мягкая». При создании каркаса «мягких» роботов используется пенопласт, покрытый воском. Воск в данном случае нивелирует переход между твёрдым и мягким состоянием вещества. Так, при низкой температуре каркас становится жёстким, а при нагревании – наоборот размягчается.
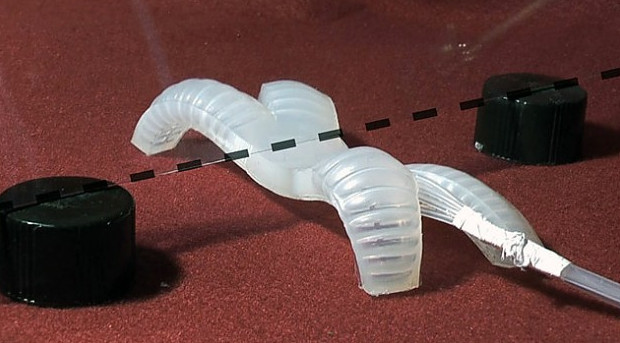
Движения в данном случае осуществляются за счёт избирательной деформации определённых частей структуры, что позволяет создавать суставы и производить движения с помощью специального кабеля. «Мягкий» робот – это объединение нескольких деформируемых конструкций, который может работать в ограниченном пространстве.
Исследования по созданию «мягкого» робота Flip Flop ведутся в рамках проекта Chembot DARPA, в котором принимают участие компания Boston Dynamics, Институт Макса Планка и Университет Стони Брук. В планах его участников создание гибких роботов, в частности, роботов-хирургов, которые смогут перемещаться внутри тела и даже сосудов, избавляя больного от различных недугов.
И будьте в курсе первыми!